GY-NEO6MV2 GPS MODUL
GPS zum kleinen Preis.
Weiterlesen
GPS zum kleinen Preis.
Weiterlesen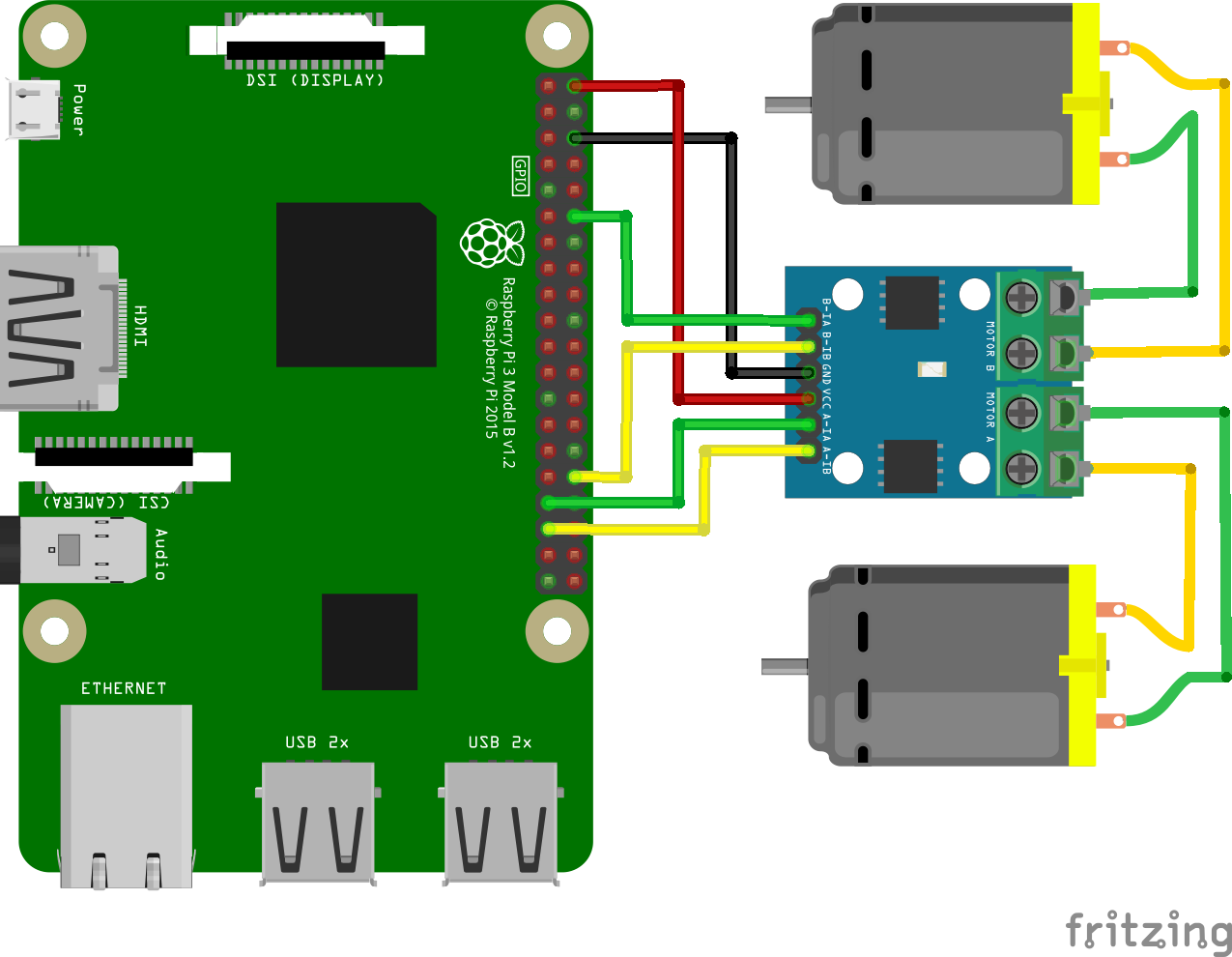
Ziel ist es mit dem Raspberry PI 3 unter Zuhilfenahme einer Motorbrücke, 2 Gleichstrommotoren zu betreiben. Dies soll später genutzt werden um einen zweirädrigen Roboter anzutreiben. Hardware PI3 (oder älter bitte auf die richtigen Pins achten) Motorbrücke L9110s 2x DC Motor Diverse Kabel ( Vorgefertigte Pin-Header Kabel) Testaufbau GPIOs am Raspberry Motor1 Richtung GPIO 26 …
Weiterlesen