
Last Updated on 29. Januar 2024 by sfambach
An dieser Stelle teste ich mal einen recht teuren Sensor für >36€ welcher die anderen Entfernungsmesser um „Längen“ schlägt ;). Der Sensor hat einen winzigen Anschluss (GH1.25-4p SMT type). Hierfür liegen zwei Kabel bei. Eines mit zwei GH1.25-4p Steckern und eines mit den gewohnten PinHeader, welcher es ermöglicht den Sensor direkt am Arduino zu betreiben. Der Sensor wird mit 4.6V – 6 V versorgt. Somit ist ein Einsatz an 3.3V Micro-Controllern nur über Logik Level Converter möglich.
Ich wollte eigentlich die I²C Version testen leider ist die UART Version hier angekommen, weshalb ich diese nun hier vorstelle. Da ich keine Doku über den die I²C Version gefunden habe bin ich mir immer noch nicht sicher ob mit dem aktuellen Sensor nicht auch I²C möglich wäre. wenn ihr mehr wisst lasst einen Kommentar da. )
Fakten
| Sensorname | TF Mini |
|---|---|
| Typ | Lidar |
| Entfernung [mm] | 30 – 12000 |
| Genauigkeit [mm] | entf. <6m = 40 entf. >6m = 60 |
| Winkel [Grad] | 2,3 |
| Spannung [V] | 4,5 – 6 |
| Strom [mA] | 120 |
| Größe l/b/t [mm] | 42 x 15 x16 |
| Gewicht [g] | 4,7 |
| Schnittstelle | UART |
| Frequenz/ Wellenlänger | 940nm |
Anschlüsse
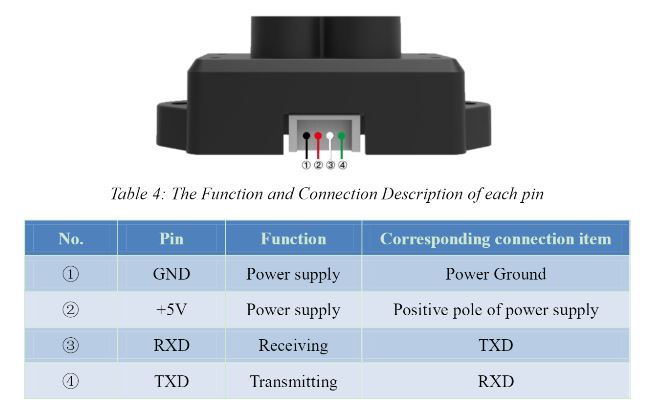
| Beschreibung | Wert |
| 1 Masse | GND |
| 2 Versorgungsspanung | 4.6V-6V |
| 3 UART Empfang | TXD |
| 4 UART Senden | RXD |
Daten der seriellen Schnittstelle
| Beschreibung | Wert |
|---|---|
| Bautrate | 115200 |
| Daten bits | 8 |
| Stop bits | 1 |
| Parity check | None |
Anwendungsbereiche
- Entfernungsmessung
- Katographie (bis 12m)
- Bei Drohnen zur Höhenbestimmung
- Durchgangskontrolle
- Kontaktloses Auslösen
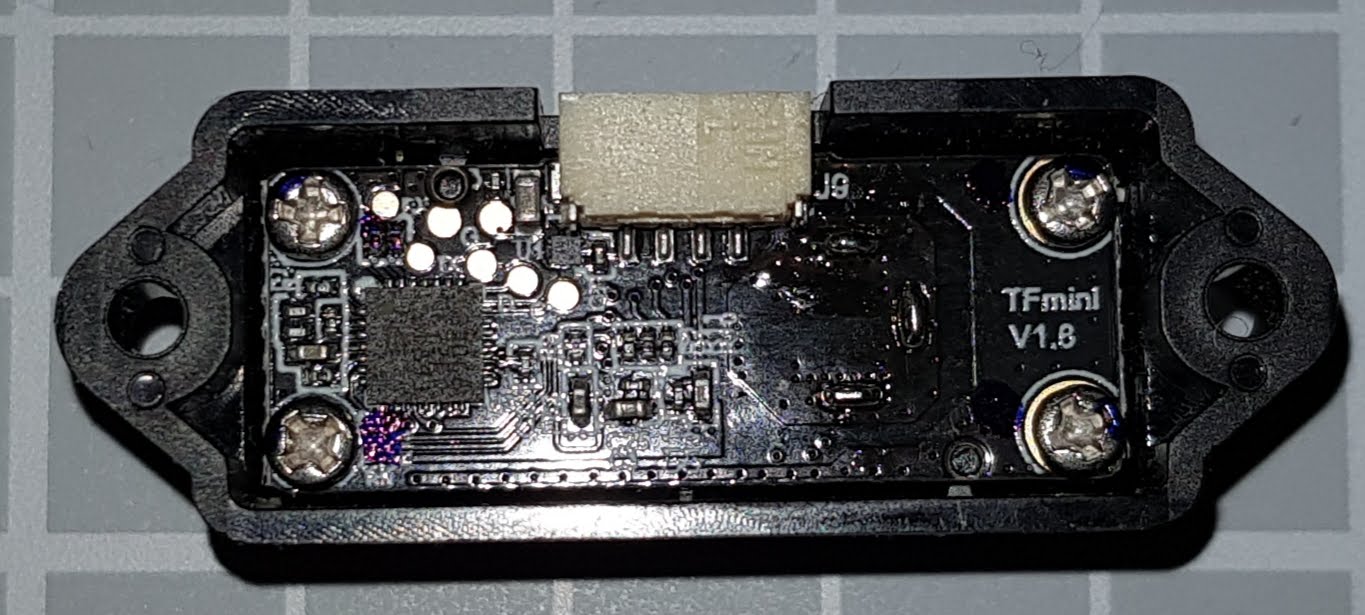
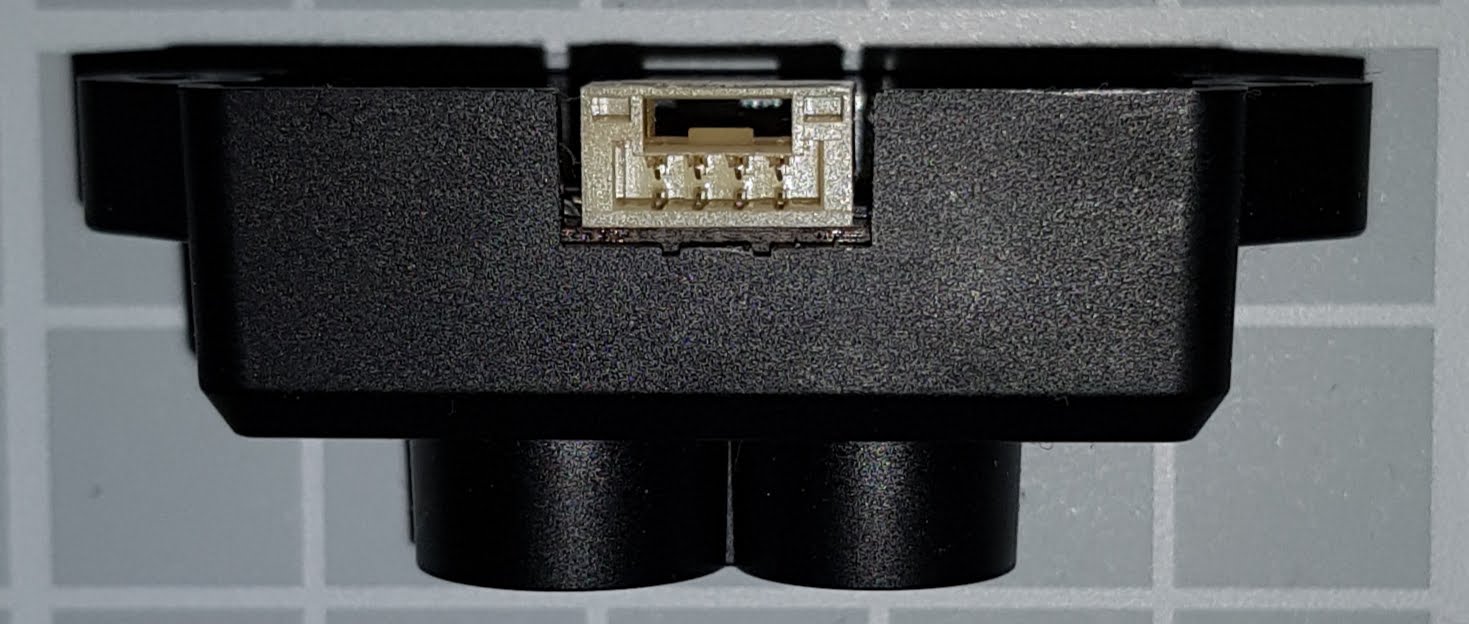
Ansichten


Programmierung
Bibliotheken
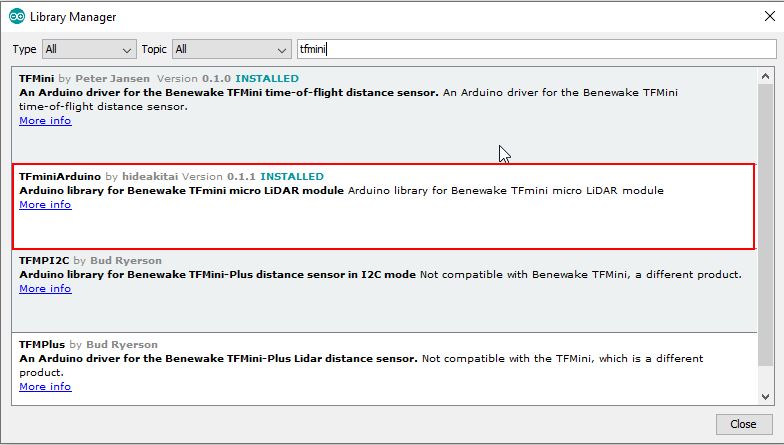
Ardunio
Im Bibliothekar gibt es auch einige Bibliotheken für den FTMini. Mit der oberenen von Peter Jansen hatte ich Probleme. Deswegen habe ich den Zweiten Eintrag für meinen ersten Test gewählt.
Alternativen
Letztendlich habe ich die Lib von Peter Jansen noch zum laufen gebracht. Somit hier der link zur Bibliothek und zum Bugfix.
https://github.com/opensensinglab/tfmini
Bugfix: https://github.com/opensensinglab/tfmini/issues/9
ESPx
Die Biliothek Peter Jansen soll auch mit dem ESP funktionieren, allerdings müssen hierfür wohl alle Serial.print(ln) ’s aus der .cpp Datei entfert werden (Siehe auch). Ich habe das Projekt geforkt und sowohl id Printlines als auch den Bugfixes für die Checksumme eingebbaut. Leider konnte ich sie noch nicht testen.
https://github.com/sfambach/tfmini_esp
Verdrahtung
Hier die Verdrahtung des Sensors über den UART. Der Sensor sieht leider etwas anders als im Original aus, deshalb bitte die Pin-Zuordnung unten in der Tabelle beachten.
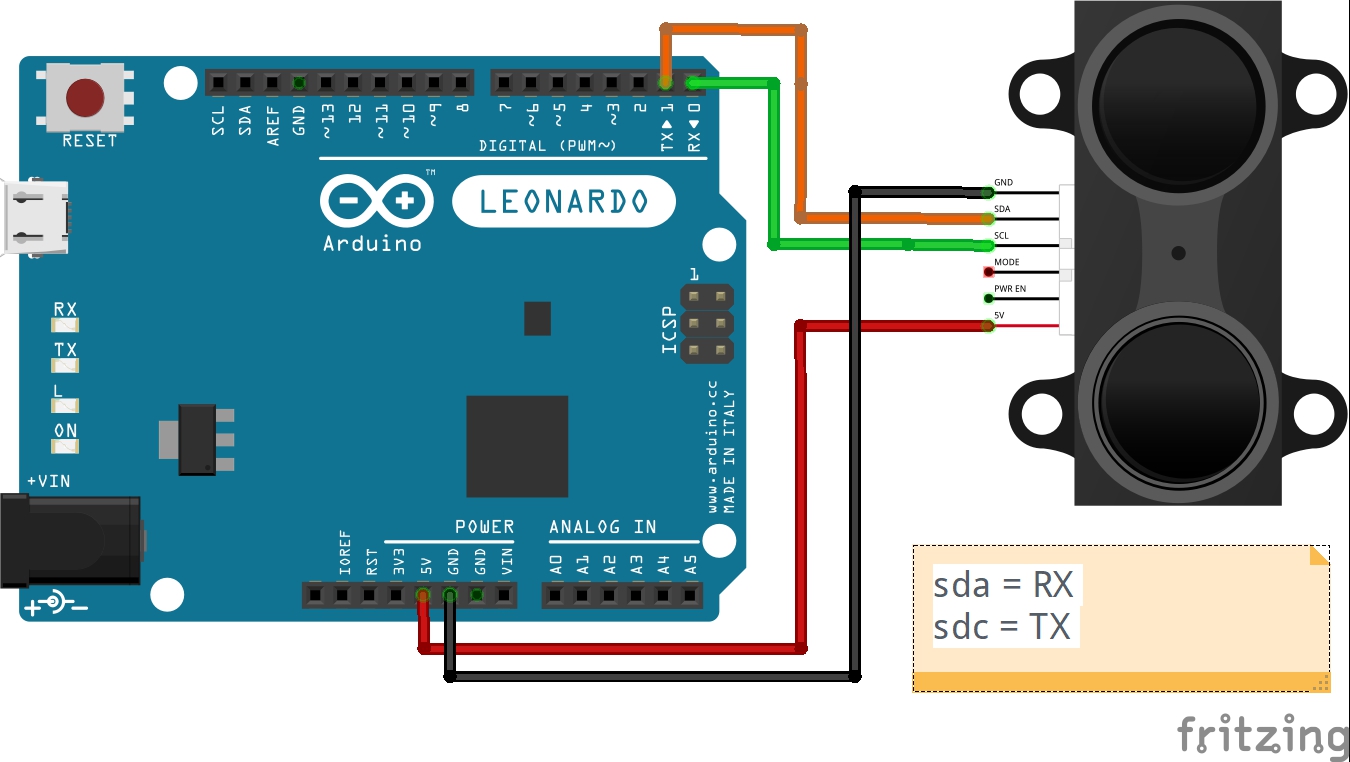
| Arduino | GY530 |
| 5V | VIN |
| GND | GND |
| Pin D0 | TX |
| Pin D1 | RX |
Da die UART meist auch für Ausgaben auf der Console benötigt wird, bietet sich beim Leonardo/Uno Board die Verwendung eines Sofware Uart an. Bei dieser können die RX/TX Pins fast frei gewählt werden zum Beispiel Pin 10/11.
| Arduino | GY530 |
| 5V | VIN |
| GND | GND |
| Pin D11 | TX |
| Pin D10 | RX |
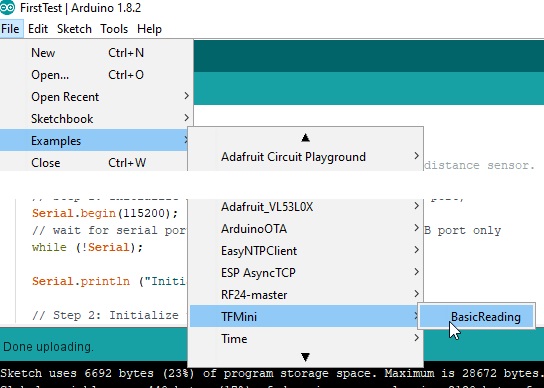
Testprogramm
Testprogramm auswählen, compilieren und auf den Arduino spielen. Evtl. die Pins und den Seriellen Port umstellen.
Hier mein Entwurf
https://github.com/sfambach/TF-Mini-Lidar
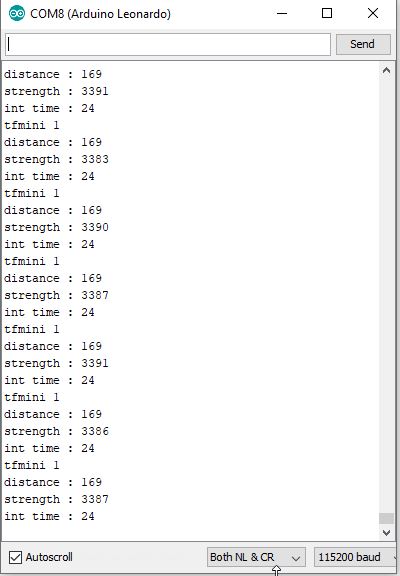
Und das kommt auf der Konsole raus:
Probleme
Keine Verbindung
Verdrahtung überprüfen und einfach mal RX und TX tauschen.
Sonstiges
Telegramm Aufbau
[0x59,0x59, Länge low, Länge high , Stärke low, Stärke high, reserviert, Signal Qualität, checksum]
- Jedes Telegramm beginnt mit zwei Byte 0x59 und endet mit der Checksummer
- Enfernung = (Länge high << 8) + Länge low.
- Stärke = (Stärke high << 8 )+ stärke low.
- Reserviert = heisst so viel wie nicht genutzt.
- Signal Qualität= 0, 255.
- Für die Checksumme werden alle Bytes ausschliesslich der Checksummer und des Headers summiert ( Länge low + Länge high + Stärke low+ Stärke + reserviert + Signal Qualität).
Testprogramme (UPDATE 19.07.2021)
Ich habe ein GIT Repository mit ein paar Testprogrammen angelegt, welche die Inbetriebnahme erleichtern sollen.
https://github.com/sfambach/TF-Mini-Lidar
Frizing Parts
Einen Fritzing Part gibts bei Git, dieser passt leider nicht ganz:
https://github.com/PulsedLight3D/LIDAR-Lite-Fritzing-Part
Fazit
Der Sensor funktioniert und hat eine unschlagbare Reichweite. Leider nimmt er es nicht so genau und der Preis ist auch mit ~36€ sehr hoch. Wer jedoch über Entfernung von 4 Metern der Sonarsensoren hinaus will und schnelle Messungen benötigt findet mit diesem Sensor einen Verbündeten.
Ähnliches
- GY-530 VL53L0X Laser-Entfernungsmesser
- RC Auto mit PS2 Controller
- Arduino – HC-SR04 Entfernungsmesser
- Mit dem Raspberry PI 3 den Entfernungsmesser US-100 ansteuern
- US-100
- HC-SR04 Entfernungsmesser
- US-015
Quellen
Technischer Support für TF-MINI
https://learn.sparkfun.com/tutorials/tfmini—micro-lidar-module-hookup-guide/all
https://github.com/opensensinglab/tfmini/issues/6
| Datum | Änderung | Autor |
|---|---|---|
| 30.04.2020 | Beitrag erstellt | sfambach |