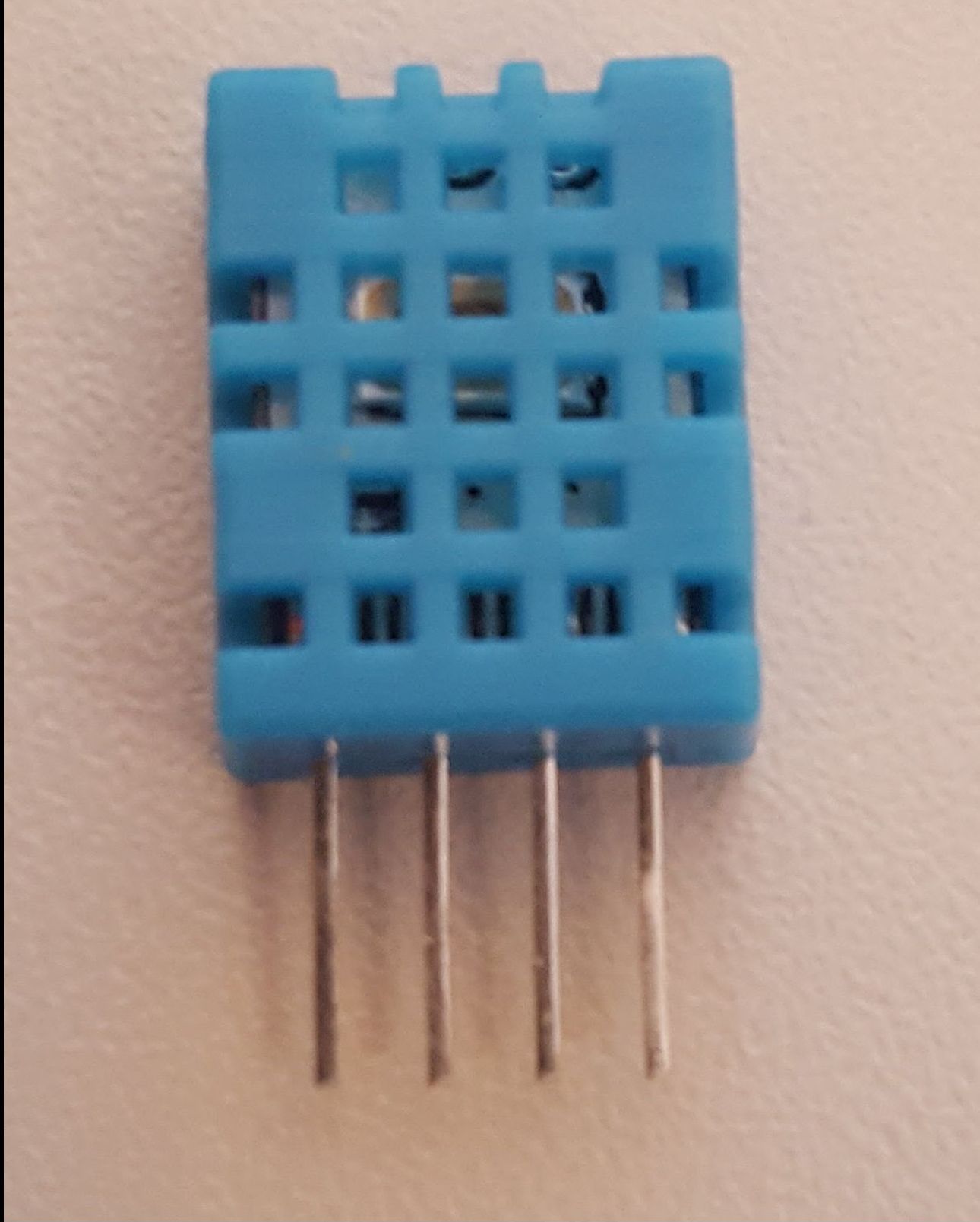
Arduino – DHT11 Feuchtigkeitsmesser
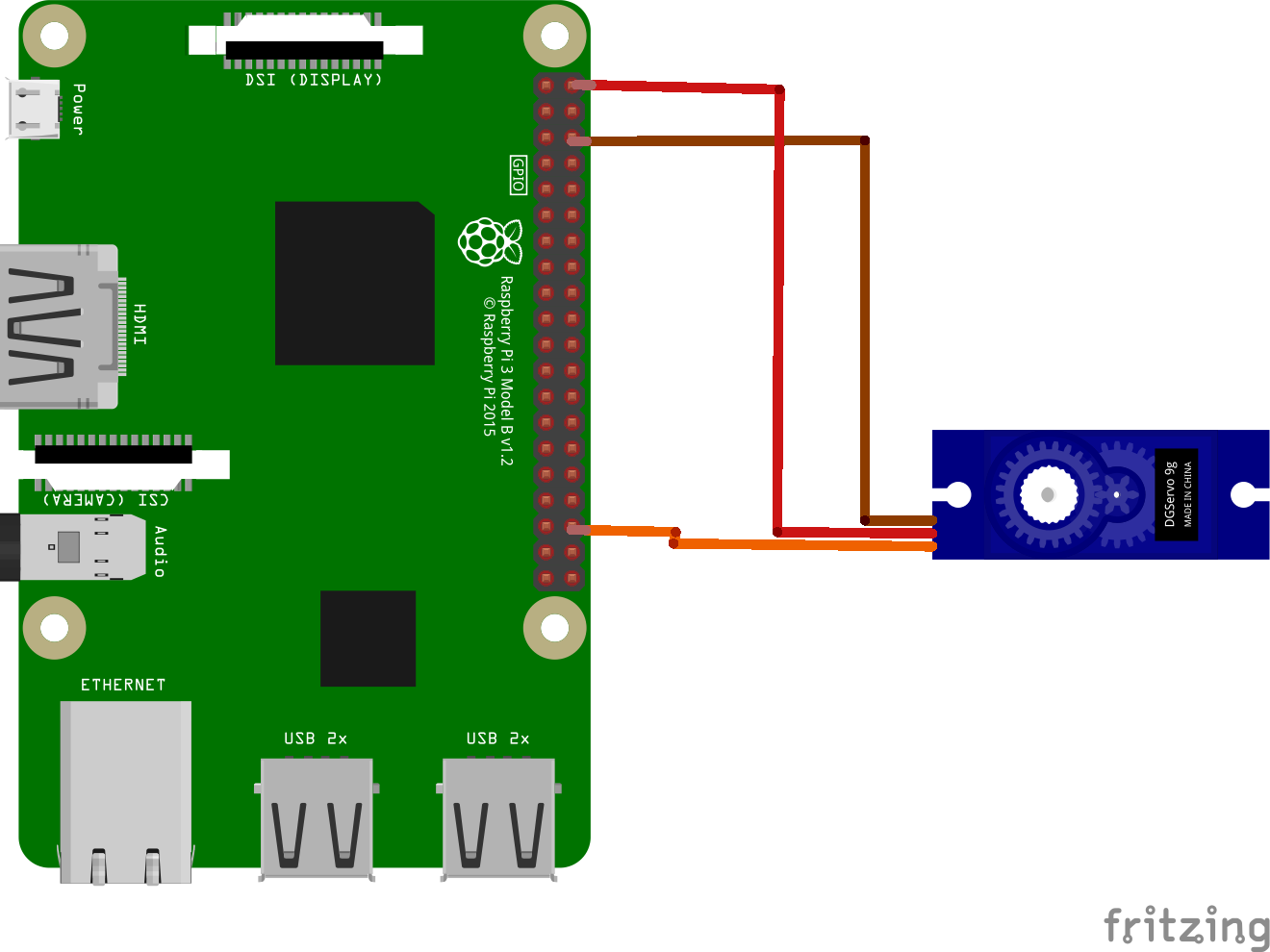
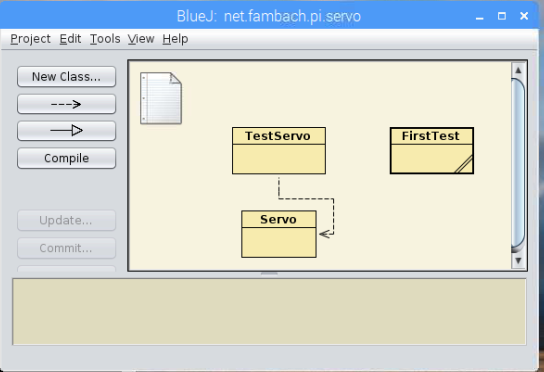
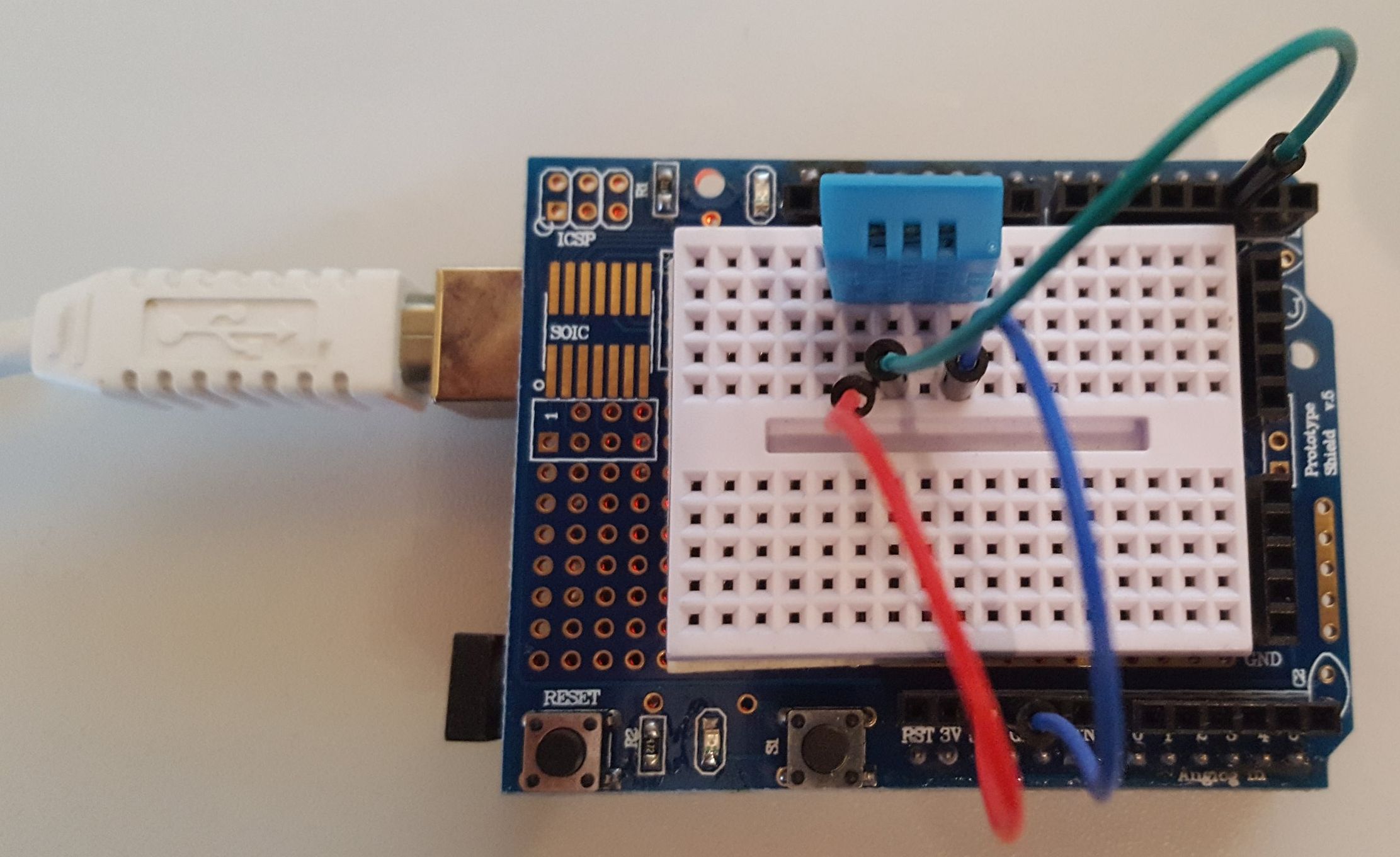
Ansteuerung eines DHT10 Sensors über den Ardunio Uno. Grundlagen Link zum Beitrag Schaltung Ansicht Verdrahtung Programmierung Bibliotheken Die Einbindung der Bibliothek kann dem folgenden Beitrag entnommen werden: Link zum Beitrag Testprogramm Output Verwandte Beiträge Quellen
Weiterlesen