Retro – (L/E)EPROM Hardware
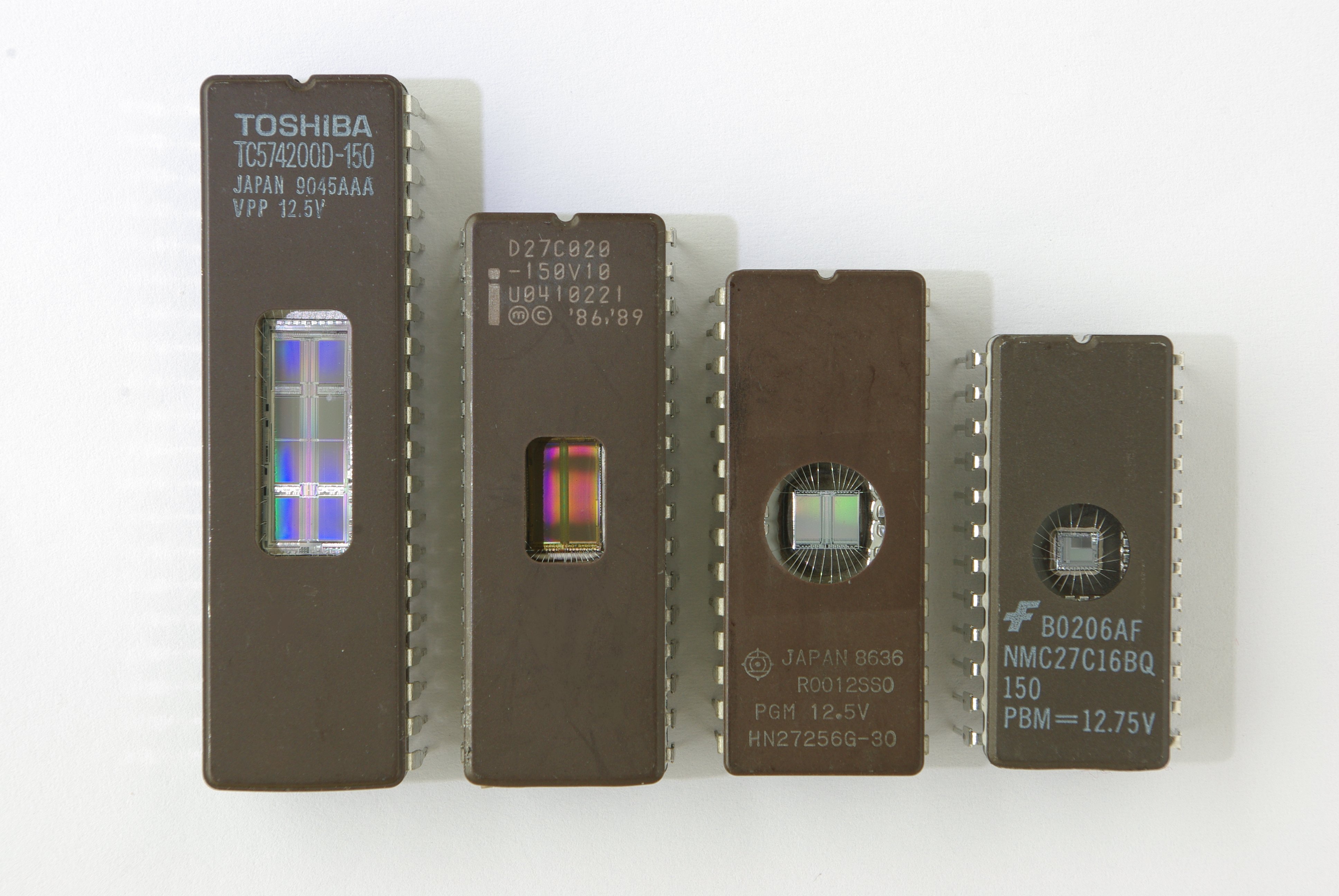
(Titelbild: yellowcloud from Germany – EPROMs 4M, 2M, 256k, 16kbit) Vorab dies ist eine Lebende Seite, ich werde hier immer mal was hinzufügen, korrigieren oder entfernen was nicht stimmt. Also keine Gewähr auf die Richtigkeit (Bitte Datenblätter prüfen). Ich gebe mir dennoch mühe beim Schreiben nicht zu lügen und vermeide Halbwahrheiten. Wo ich mir nicht sicher bin steht …
Continue reading "Retro – (L/E)EPROM Hardware"