Last Updated on 13. Dezember 2020 by sfambach
Hier wird der Zusammenbau und die Inbetriebnahme des billig Pan/Tilt Bausatz vom schnellen Ali beschrieben. Pan/Tilt ist eine Platform die sich, mit Hilfe von zwei Servos oder Motoren, in zwei oder mehr Richtungen schwenken lässt. Meist werden diese für Kameras verwendet, sind aber auch im Roboter-Umfeld sehr beliebt.
Fakten
Folgende Bestanteile werden für den Test benötigt.
- Pan Tilt Bausatz (Adafruit od. Aliexpress)
- 2 Servos (nehmt die billigen, die Metal Gear passen nicht)
- Arduino Uno oder ähnlich
- Motor Platine V1 (optional ist nicht nötig aber sehr praktisch)
- Ein paar Pinheader Kabel
- Ein Steckbrett (Optional)
Anwendungsbereiche
- Als Kamera Basis
- Zum bewegen von Sensoren
Ansichten
Hier die Ansichten und der Zusammenbau.

Servo * Pan/Tilt Verpackt 
Pan Tilet Bestandteile 
Metal Gear Servo Bestandteile 
Billig Servo 
Servo in Fußteil eingelegt 
Beide Seiten des Fußteils umschliessen den Servo 
Fußteil Ansicht von rechts 
Fußteil Ansicht von Links mit Schrauben beiliegend 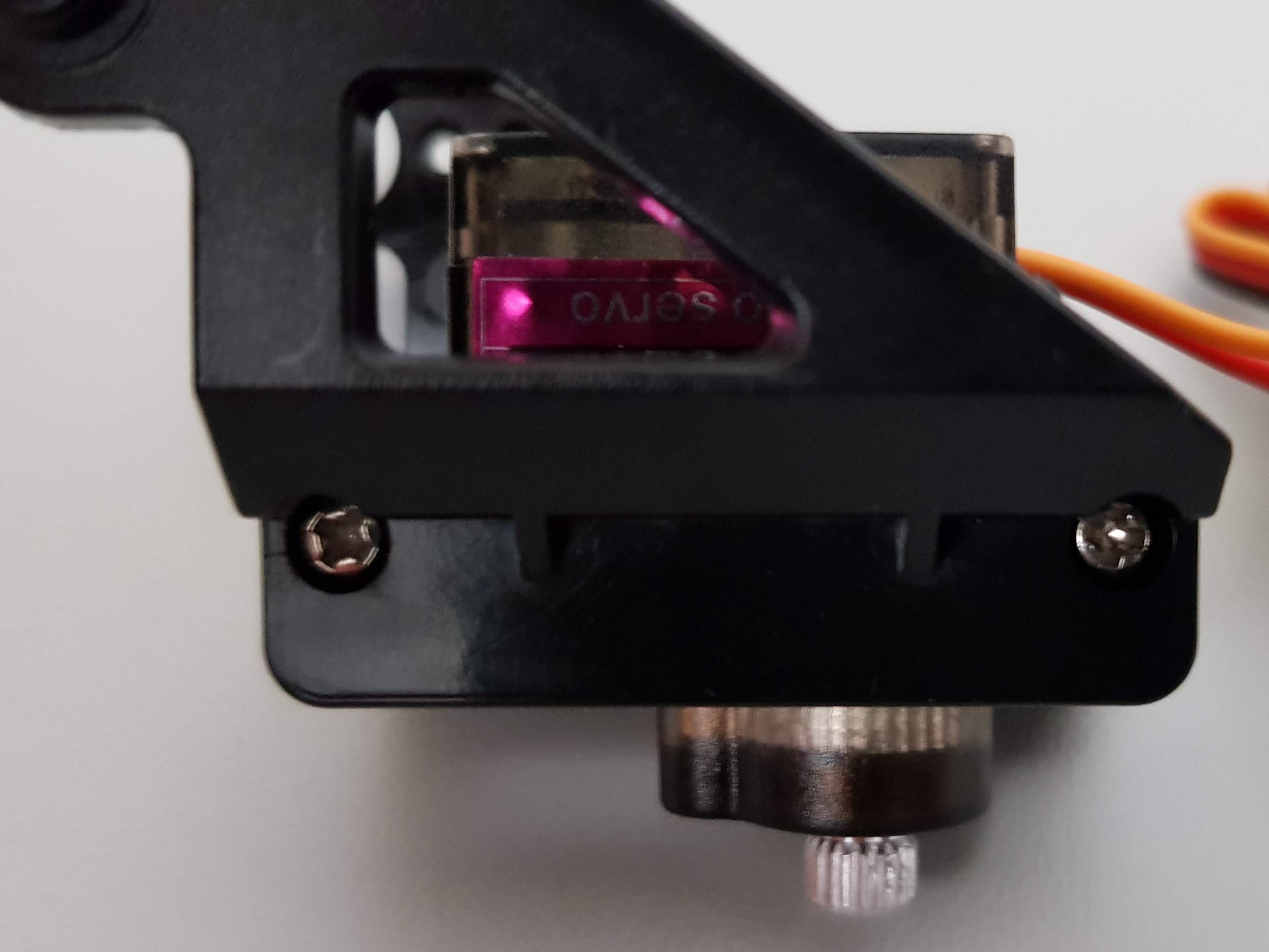
Fußteil Ansicht von Links mit Schrauben eingeschraubt 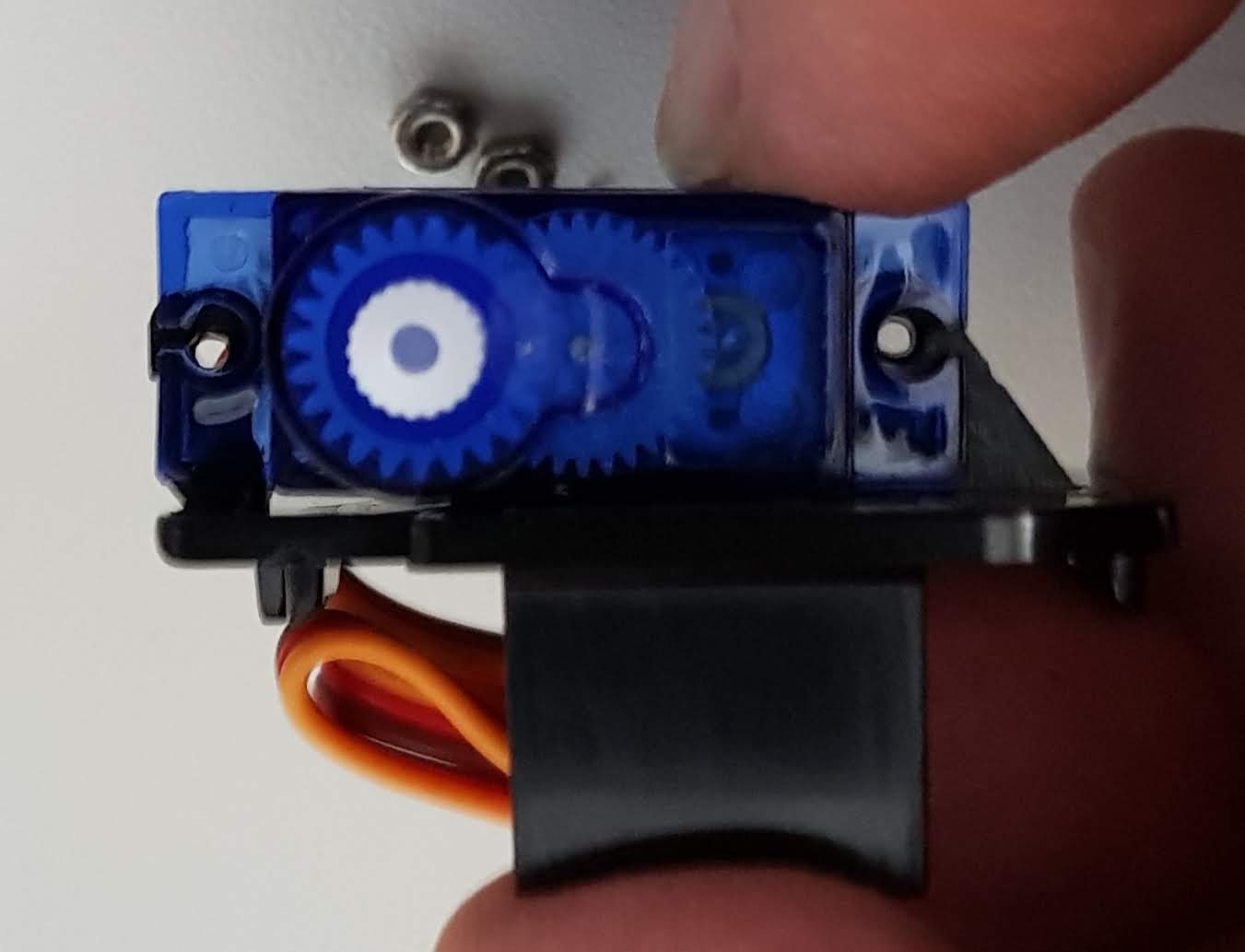
Kopfteil mit eingelegten Servo 
Kopfteil mit verschraubtem Servo 
Pan/Tilt Nicht passende Halterung 
Pan/Tilt angepasste Halterung 
Pan/Tilt rückseite Halterung 
Pan/Tilt rückseite Halterung verschraubt 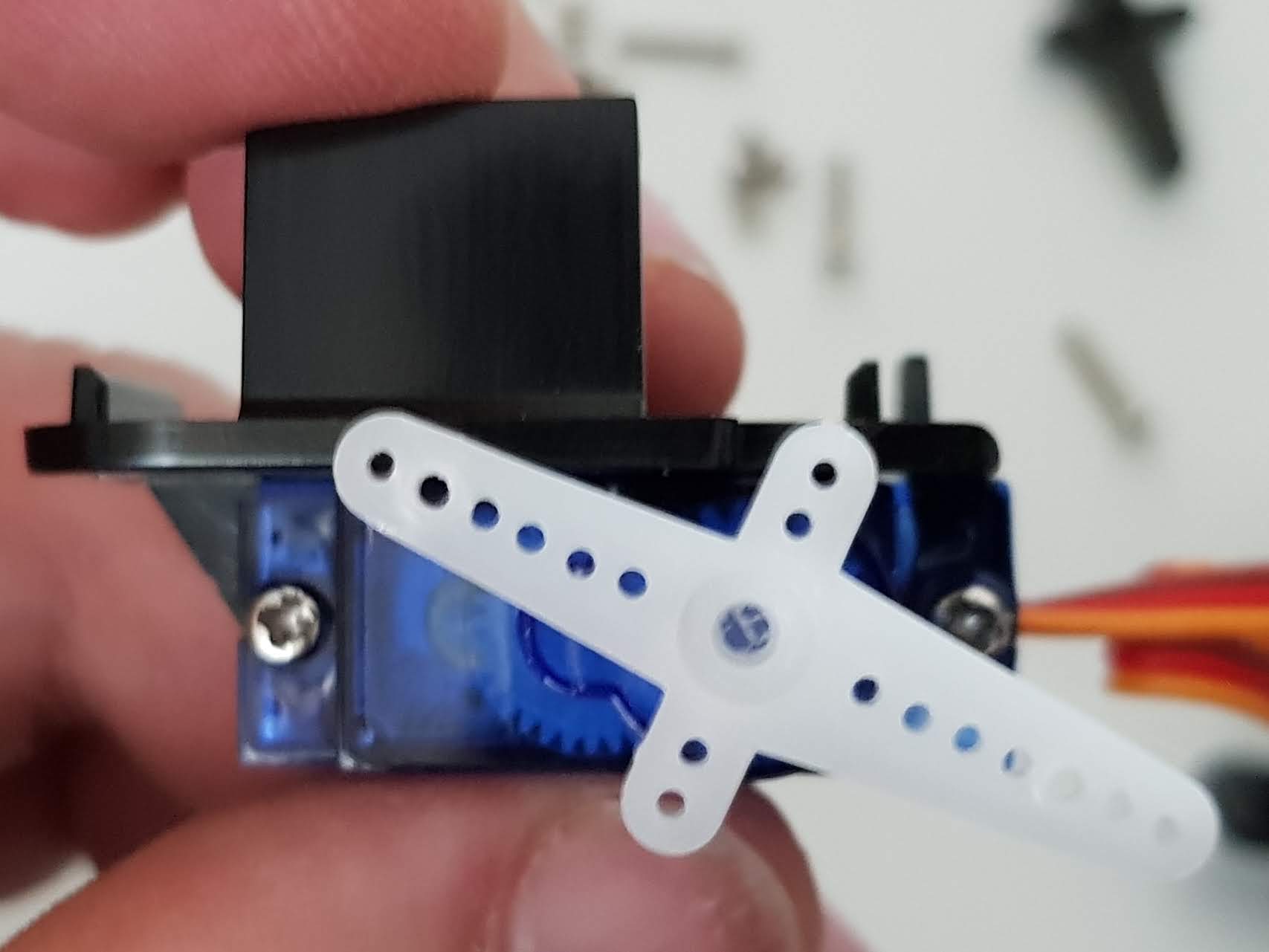
Pan/Tilt Kopf-Servo mittig ausrichten 
Pan/Tilt eingelegter Kopf 
Pan/Tilt verchraubter Kopf 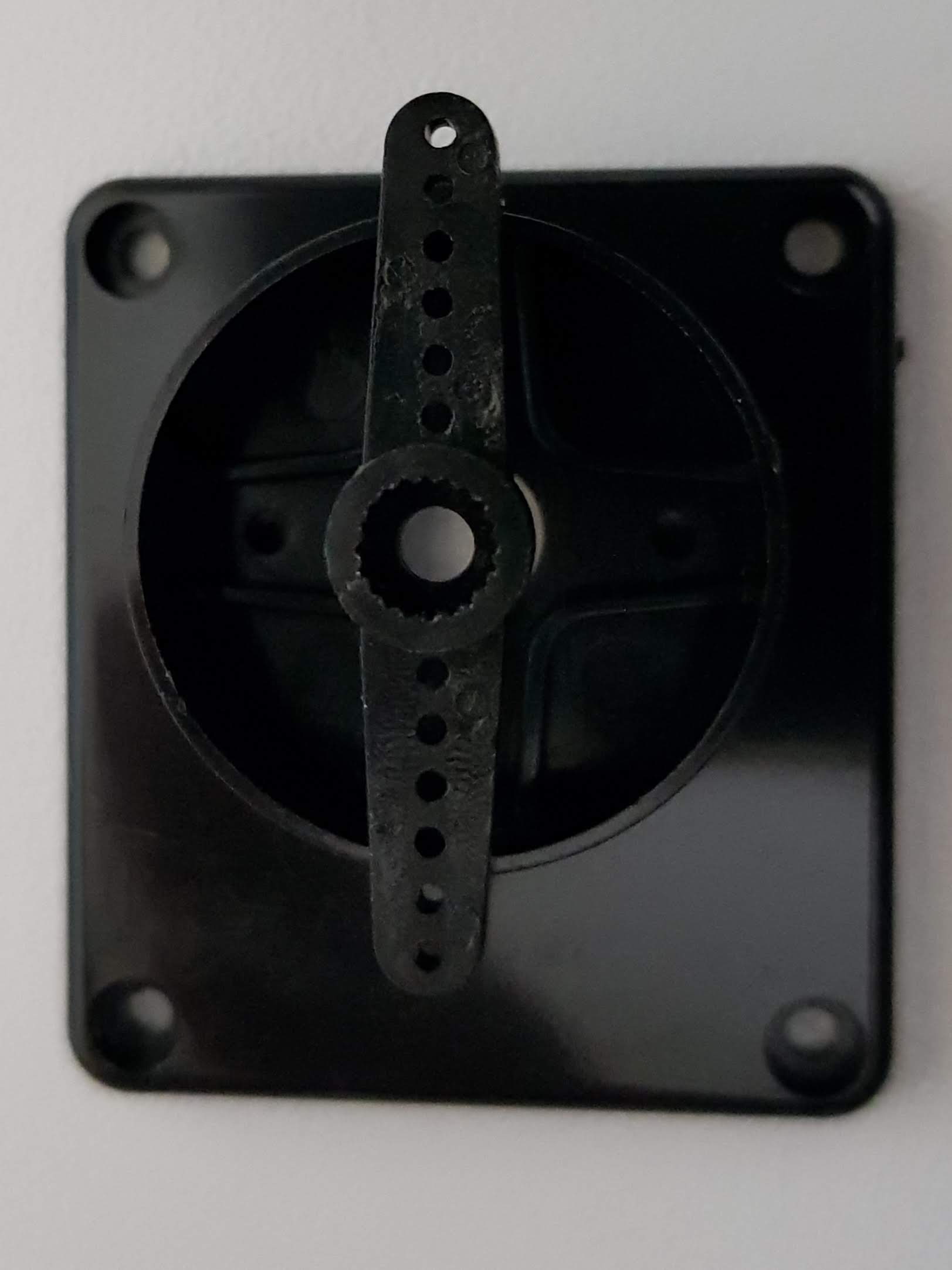
Pan/Tilt nicht passende Fuß Servor Halterung 
Pan/Tilt angepasste Servor Halterung 
Pan/Tilt Servor Halterung in Fuss eingelegt 
Pan/Tilt Servor Halterung mit Fuss verschraubt 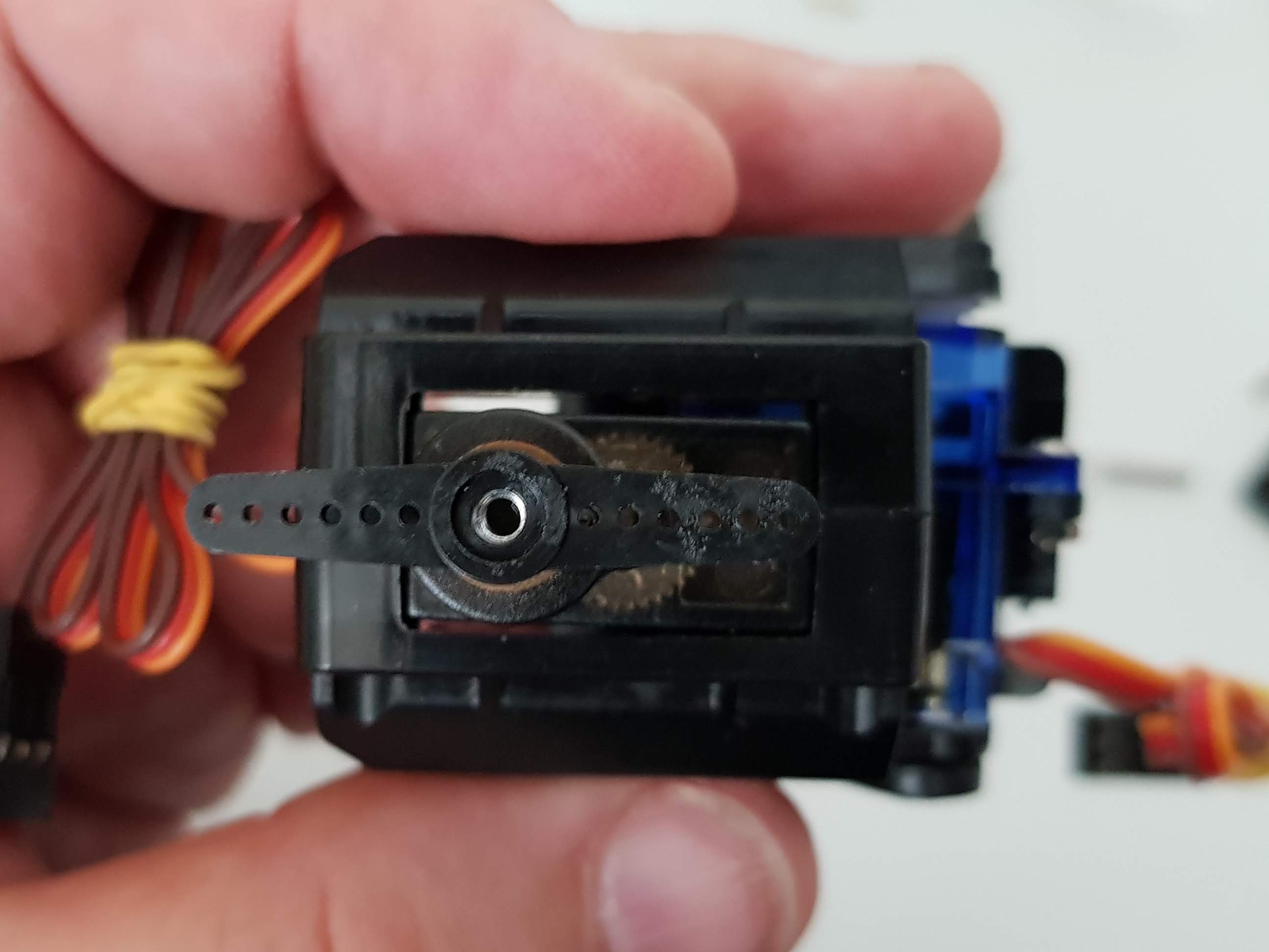
Pan/Tilt Fussservo mittig justieren 
Pan/Tilt Fussservo verschraubt 
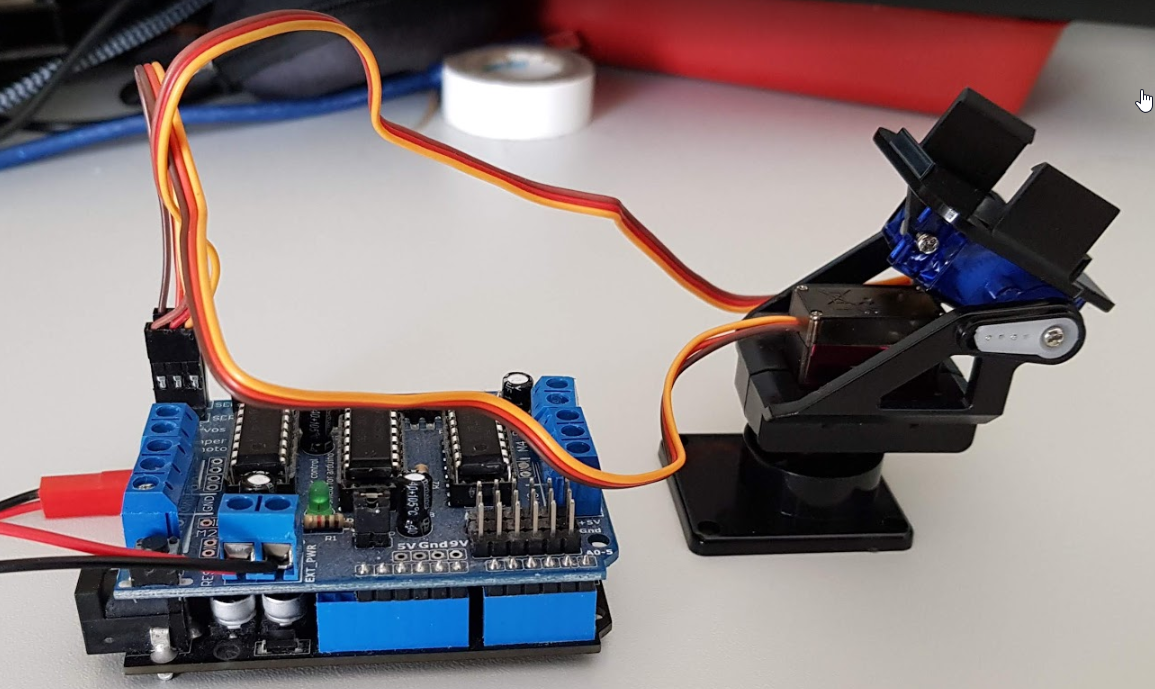
Pan/Tilt fertig zusammengebaut
Programmierung
Bibliotheken
Ist in der Arduino Bibliothek enthalten.
Testprogramm 1
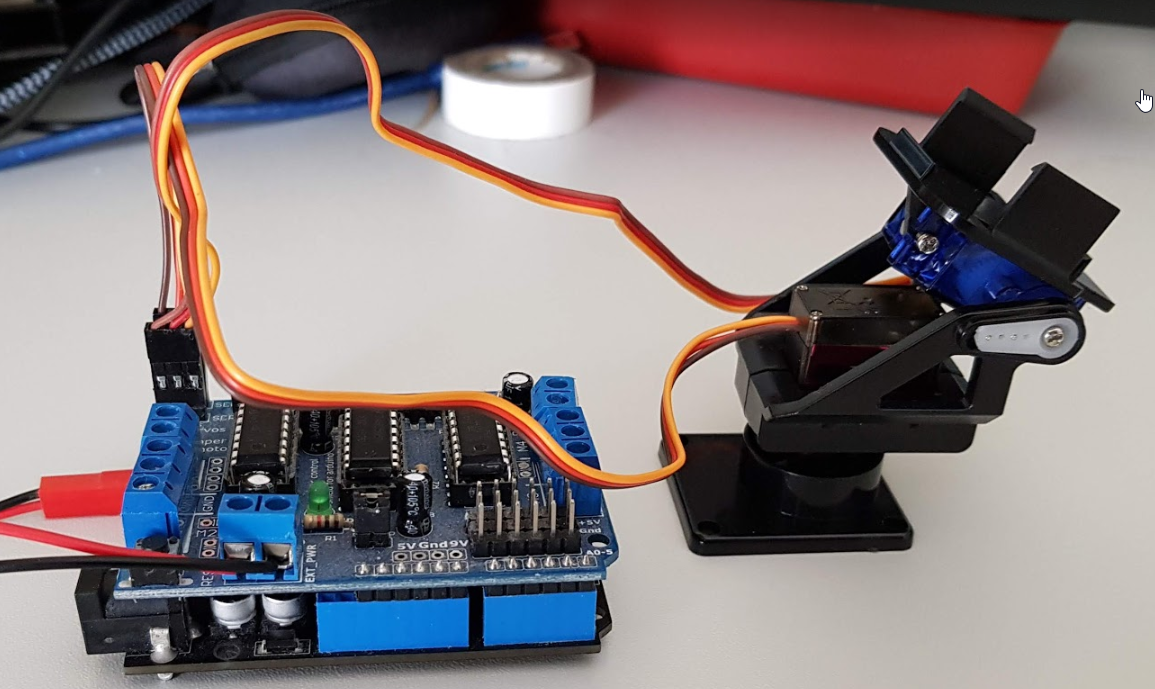
Aufbau
Die Motorplatine V1 verwendet pin 9 und 10 um die Servos anzusteuern.
Programm
Das Programm fährt beide Servos in die Endlage und wieder zurück. Der Bereich in dem gefahren wird kann über die Variablen x/ymin und x/ymax vorgegeben werden. Die initialen Werte sind meine Erfahrungswerte, diese können bei anderen Servos abweichen.
So sieht es aus
Probleme
Gute Servos Passen nicht
Ich habe mir ein paar bessere Metallgetriebe Servos besorgt. Diese passen aber leider nicht als oberer Servo, zum neigen des Kopfes, weil sie einwenig zu hoch sind. Um das Problem zu umgehen, habe ich hierfür billige Kunstoff Servos verwendet.
Sonstiges
Befestigung von Objekten am Pan Tilt
Zur Befestigung von Objekten wie beispielsweise Kameras, Entfernungssensoren am Pan/Tilt habe ich die folgenden Materialien verwendet:
- Haushaltsgummi
- Kabelbinder
- Heiß- od. Sekundenkleber
- Draht
Fazit
Auch billige China ware kann spass machen, so funktioniert dieser Pan/Tilt und ist nicht teuer.
Schade ist dass die teureren Servos nicht passen, da das Gehäuse etwas höher ist.
Verwandte Beiträge
- Sunflower
- FunduMoto L298P High Power Motorbrücken
- 16 Servoboard PCA9685
- Pan Tilt mit Joystick
- Linearer Mini Servo
- RC Auto mit PS2 Controller
- Arduino PS2 Controller Platine Grundlagen
- Raspberry PI + Servo
- Pi4J + BlueJ
Quellen
https://www.adafruit.com/product/1967
https://en.wikipedia.org/wiki/Pan%E2%80%93tilt%E2%80%93zoom_camera
https://de.wikipedia.org/wiki/Kameraschwenk
Hallo Stefan, ab und an schaue ich mal auf deinen Webblog.
Heute mit einem besonderen Grund:
ich habe seit ein paar Tagen ein HuskyLens-Mosul und möchte dieses nutzen, um ein KI-Projekt „Object-Tracking“ umzusetzen.
https://www.youtube.com/watch?v=k-LXs94nRaU
Leider erhalte ich beim Kompilieren des Arduino-Programms immer erine Fehlermeldung: ´class DFRobot_HuskyLens‘ has no member named ‚writeOSD‘
Ich vermute, das die eine alte nicht mehr funktionierende Library verwenden. Den Code findet man in der Video-Beschreibung.
Meine Frage: Da ich kein Programmierer bin, habe ich auch keine Erfahrung,diesen Code entsprechend anzupassen, damit die Pan-Tilt-Einrichtung mit der HuskyLens dem getrackten Objekt entsprechend folgt.
Der Code liefert immer die Position des Objektes xCenter und yCenter. Diese müsste dann in die Bewegung der Servos umgerechnet werden, damit der Pan-Tilt-Arm sich dann entsprechend bewegt.
Vielleicht kannst Du mir mit deiner Erfahrung damit weiterhelfen.
Viele Grüße und besten Dank ULLI