Last Updated on 16 January 2022 by Suffocation
Mit Hilfe von Hal-Sensoren Encodern oder Odometrien können die Umdrehungen von Motorwellen gezählt werden. Wie fein die Zählung ist hängt von der Auflösung ab. Ich habe mir mal einen dieser Motoren mit Hal-Sensor angsehen die Ergebnisse findet ihr hier zusammengefasst.
Facts
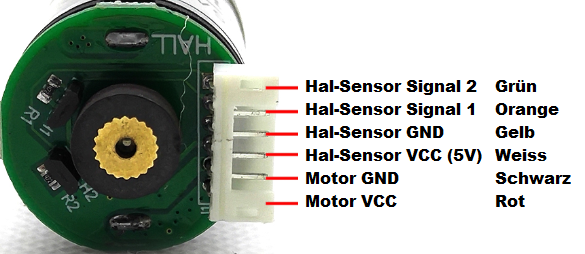
Mein Motor hat 6 Anschlüsse. Zwei für die Motor 9V Versorgungsspannung und 4 für den Encoder. Zwei hiervon sind für die 5V Versorungsspannung der beiden Hal-Sensoren und die anderen für die Signalleitungen.
- Hall Sensor 5V DC
- Motor voltage: DC 9V
- Leerlaufstrom: ≤200mA
- Max. current: 1.2A
- Engine speed: Idle 150 rpm – Load 100 rpm/min
- 150 Zähler des Encoders pro einer Wellenumdrehung
Areas of application
- Autonomous positioning systems (Warning: highly error-prone).
- For precise control/positioning of shafts (e.g. Gimbal)
Views
Hier ein paar Bespiele für Belegungen. Also genau hin schauen und am Besten nur Motoren kaufen bei denen die Belegung und die Betreibsspannungen klar sind.
My booking with Omnicar 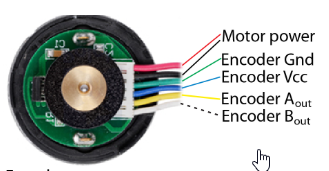
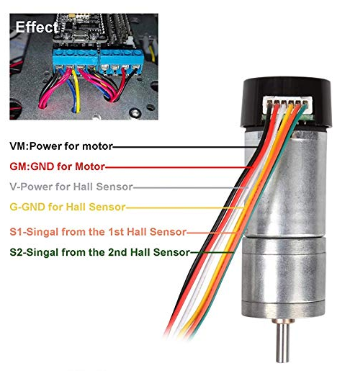
Same assignment, different colours 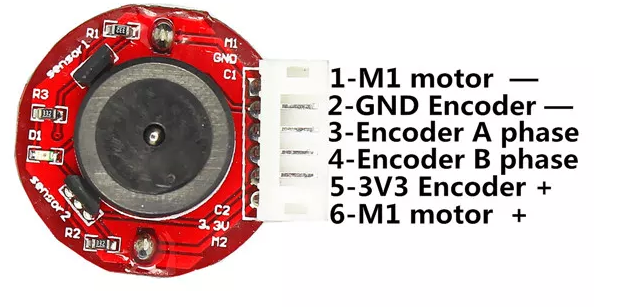
Other assignment
Stückliste
- Geared motor with encoder
- Arduino Uno
- Cable
Programming
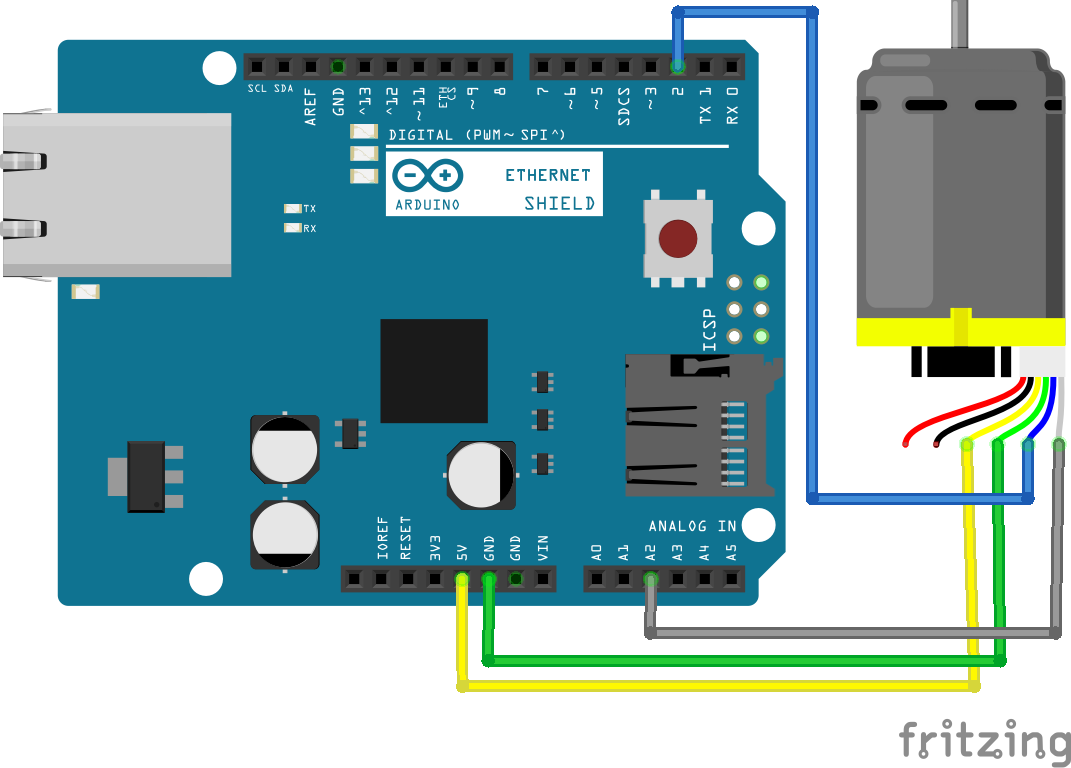
Circuit
Der Encoder 1 hängt am Interruptpin 2. Den Motor selbst habe ich nicht mit Strom versorgt, da für diesen Test das manuelle drehen der Welle reicht.
Libraries
Eine Zusätzliche Bibliothek ist nicht notwendig, der Arduino bringt schon alles mit.
Test programme
The test programme I have under this Link gefunden und auf meine Bedürfnisse angepasst. Das Beipiel verwendet den Interrupt des Arduinos. Da der Uno nur zwei hat ist somit bei zwei Motoren schluss. Der Arduino Mega und der ESP kann da mehr.
Here is the example to download:
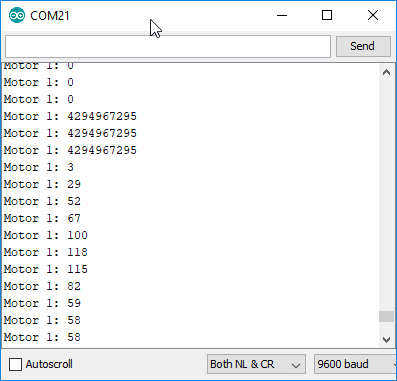
This is what it looks like
Conclusion
Reading the encoder seems simple. However, Andrew Kramer describes a few inaccuracies. Should the x
Wenn man jedoch die Motoren synchronisieren möchte, bietet der Encoder eine Möglichkeit dies zu automatisieren.
Verwandte Beiträge
- GY-530 VL53L0X Laser Rangefinder
- Pan Tilt with joystick
- Arduino – Pan/Tilt Test
- Triangular robot chassis with omnidirectional wheels
- Arduino USB Host expansion board
- GY-273/HMC5883L – Compass Module
- Arduino Chess Clock
- RC car with PS2 controller
- NRF RC Car
- Menu classes for LCD displays
Sources
Motor Encoders with Arduino
https://goetzmd.de/diy/arduino/arduino-encoder-tutorial-fuer-anfaenger
https://www.instructables.com/id/Motor-With-Encoder-How-to-Read-Input-Value-From-En/
https://www.allaboutcircuits.com/projects/use-an-arduino-to-control-a-motor/
https://www.digikey.de/de/blog/using-bldc-hall-sensors-as-position-encoders-part-3
https://www.instructables.com/Hall-Effect-Sensors-1-Position-Control/
https://hartmut-waller.info/arduinoblog/licht-schalten-hall-sensor/
https://store.arduino.cc/mega-2560-r3
| Date | Change | Author |
|---|---|---|
| 16.06.2019 | Post created | Suffocation |