Last Updated on 12 July 2019 by Suffocation
Ich hatte einen Joystick, einen Arduino und einen Pan Tilt übrig und dachte mir das könnte man doch mal kombinieren. Seht was dabei raus gekommen ist.
Facts
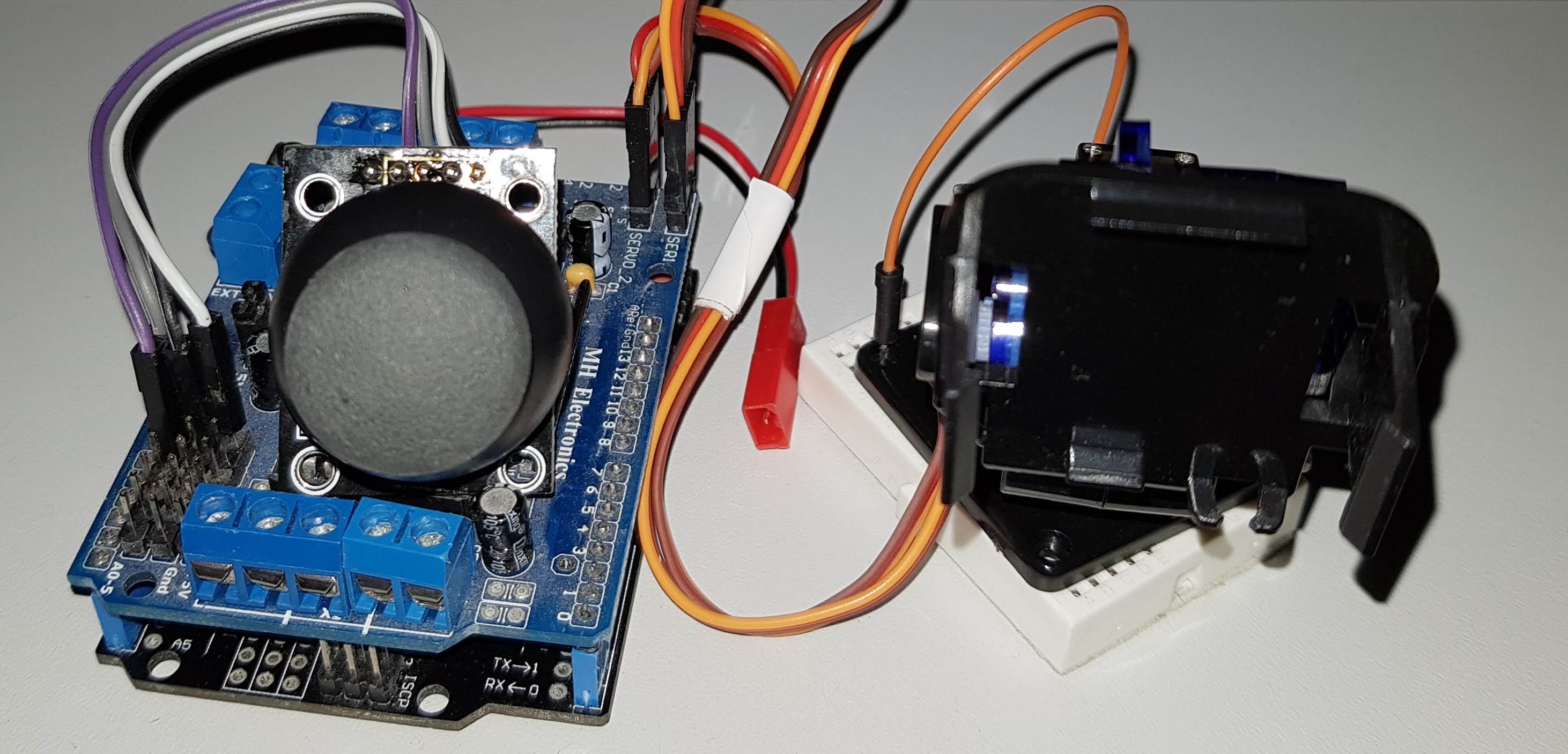
This is what I needed:
- Analogue joystick with two axes
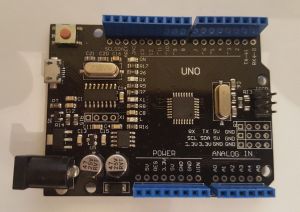
- Ardurino Uno oder ähnlich
- Pan and tilt with two servos
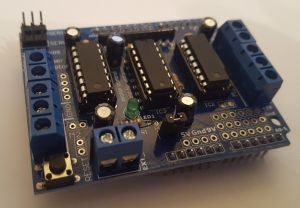
- Motorplatine V1 (praktisch aber nicht nötig)
- A few pin header female to female cables
Areas of application
- Remote-controlled pan and tilt of a camera
- Pff... don't know... part of a worm or snake robot
Views


Pan/Tilt ready assembled
Programming
Libraries
Es werden keine zusätzlichen benötigt.
Test programme 1
Das Programm ist gänzlich einfach aufgebaut, es holt die Stellung des Joysticks und rechnet sie direkt, mit Hilfe des Map Befehls in Servo Einstellungen um.